Projet Robinet Automatique à Servomoteur avec Arduino

1. Titre et introduction
Robinet automatique sans contact – Arduino + HC‑SR04 + Servomoteur
Ce projet ouvre et ferme un robinet mécanique dès qu’une main approche, grâce à un capteur de distance HC‑SR04 et un servomoteur pilotés par une Arduino Uno.
2. Matériel utilisé
Arduino Uno
HC‑SR04 (capteur ultrason)
Câbles
Servomoteur (ex. SG90)
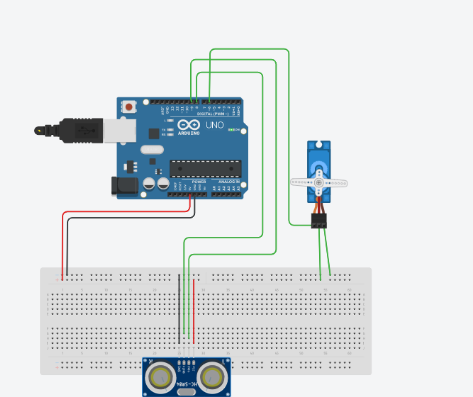
3. Schéma de câblage
HC-SR04:
Trigger → Pin 9 (Arduino)
Echo → Pin 8(Arduino)
VCC → 5 V
GND → GND
Servomoteur:
Signal → Pin 6 (Arduino PWM)
VCC → 5 V
GND → GND commun4. Code Arduino
#include <Servo.h>
#define trigPin 9
#define echoPin 10
#define threshold 15 // cm
Servo robinetServo;
void setup() {
Serial.begin(9600);
robinetServo.attach(6);
robinetServo.write(0);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
void loop() {
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
long duration = pulseIn(echoPin, HIGH);
int distance = duration * 0.034 / 2;
Serial.print("Distance : "); Serial.print(distance); Serial.println(" cm");
if (distance > 0 && distance < threshold) {
robinetServo.write(90); // ouvre
} else {
robinetServo.write(0); // ferme
}
delay(100);
}
5.schéma de câblage
6.Tutoriel étape par étape
Montez le capteur et le servomoteur sur le robinet.
Branchez selon le schéma ci-dessus.
Chargez le code via l’Arduino IDE.
Testez : rapprochez la main et regardez le servomoteur actionner le robinet.préparé : sana ait khoya mouh